«Держак» не бесконечен
Прежде чем лезть в электронные дебри современных мотоциклов, вспомним, за что воюем. «Держак» – это максимальная сила, приложенная к колесу, при которой оно еще держится за асфальт, не соскальзывает. Причем важно понимать, что, грубо говоря, шине все равно, с какой стороны приложена сила, главное – ее максимальная величина. В реальности же на шину действуют разные по природе силы. Сдвинуть ее с траектории пытаются как продольные воздействия (при разгоне или торможении), так и поперечные (в повороте). При этом главным все равно остается векторная сумма сил (или суперпозиция). Если, например, мы хотим максимально использовать сцепление шин с асфальтом для противодействия центробежной силе, придется отказаться от торможения или разгона на дуге. Или наоборот, максимально эффективно оттормозиться можно только на прямой, любой поворот потребует своей доли сцепления в пятне контакта. Но уже давно испытания показали, что максимальный «держак» на сухом асфальте достигается при небольшой пробуксовке, практически на грани перехода от трения качения к трению скольжения. Именно этот момент создатели антиблокировочных систем и пытаются использовать во благо пилота, одновременно уберегая от юза, то есть трения скольжения. При торможении системы ABS позволяют колесу срываться в юз на какие-то мгновения и тут же – электроника отслеживает остановку колес очень быстро – вновь дают резине восстановить сцепление с асфальтом. А почему бы не заставить эффект работать во благо разгона? Именно так рассуждал инженер из компании Honda, разработавший систему ABS+TCS для вышедшей в 1992 году модели ST1100 Pan European. Как только разница угловых скоростей вращения колес (а измерялась она те два десятка лет назад через датчики ABS) превышала определенную величину, «мозг» управления мотором уводил зажигание в «поздноту» (мотик был карбюраторный, и воздействовать на состав смеси не было возможности), и тяга мотора резко падала.
Несложно предположить, что при этом разница угловых скоростей вращения колес уменьшалась, и как только она доходила до разумного – по мнению «мозгов» – предела, мотор возвращался в штатный режим. Но та система уберегала мотоцикл от активной пробуксовки при разгоне по прямой, не спасая от лоусайдов при неаккуратном обращении с ручкой газа в поворотах. Ведь в наклоне сорвать колесо в пробуксовку намного легче из-за того, что часть «держака», как мы помним, расходуется на противодействие центробежной силе. Если же сумма сил, приходящихся на пятно контакта покрышки с дорогой, превысит силу трения, колесо сорвется в юз, а корма мотоцикла вильнет наружу поворота, ставя байк боком к траектории поворота. Дальше возможны три варианта развития ситуации. Первый, наилучший: пилот не испугался и не закрыл панически дроссель, а сбросил газ быстро, но плавно – и мотоцикл стабилизировался. Второй, «продолженный»: пилот продолжил открывать газ, и через миг мотоцикл «лег» (лоусайд). Третий, «брутальный»: если пилот закрыл газ поздно или слишком резко, резина моментально вновь обретает надежное сцепление с асфальтом, но кинетическая энергия «вилятельного» движения заставляет мотоцикл подпрыгнуть, перевернуться и вышвырнуть пилота из седла (хайсайд). Так вот, современные системы трэкшн-контроля как раз и борются за удержание заднего колеса на грани сцепления резины с дорожным покрытием и вступают в работу главным образом как раз в поворотах, когда риск пустить заднее колесо в занос намного выше среднего.
Как они делают это?
Заметим сразу: никакого сходства у мотоциклетных и автомобильных противобуксовочных систем нет. В мире четырех колес системы трэкшн-контроля не только играют с тягой двигателя, но и подтормаживают отдельные колеса. У нас же – только одно ведущее колесо и коррекция тяги двигателя исключительно в меньшую сторону. Мотоциклетный антибукс сейчас стал настолько модным трендом, что практически все мотопроизводители занимаются активным внедрением подобных устройств, однако мы перечислим наиболее ярких представителей этой новой породы электронных «мулек». Первые системы нынешнего века, призванные сделать реакцию на газ более плавной и тем самым бороться со сносом заднего колеса на «гражданских» аппаратах, стали применять на литровом «гисере» 2007 года. Там не было ни датчиков скоростей вращения колес (спидометр не в счет), ни гироскопов, но зато там был второй ряд дроссельных заслонок с приводом от шагового электромотора, управляемый «мозгами». По косвенным параметрам (скорость мотоцикла, выбранная передача, положение ручки газа) оценивалась нагрузка на мотор, и на основании этих параметров контроллер систем зажигания и впрыска в зависимости от выбранной программы управления (а всего их там было три) ограничивал тягу, а точнее, скорость набора двигателем оборотов под той или иной нагрузкой.
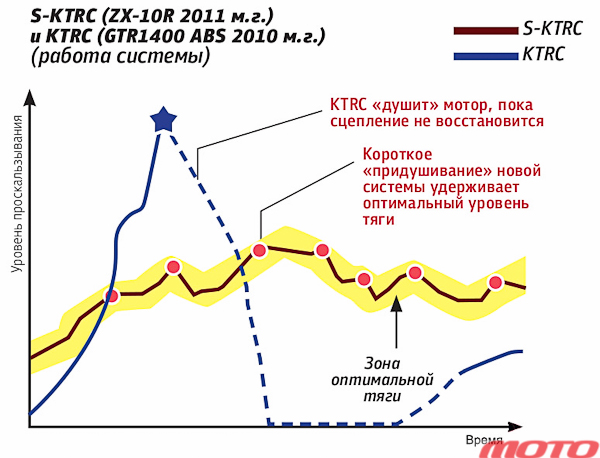
За литром последовали и «младшие братья» – обзавелись многорежимными «мозгами», которые есть даже на нынешней «шестисотке». По этому же принципу работает и «стабилизатор» на MV Agusta F4. Да, работает, но уж больно неточно. Не имея возможности отследить дорожную обстановку по прямым параметрам (угол наклона мотоцикла, скорости вращения обоих колес), такой способ уберечь заднее колесо от сноса можно назвать лишь условным.Следующим стал концерн BMW в 2006 году с вполне себе «гражданским» R1200R. Тут и скорости вращения колес отслеживались через датчики системы ABS, и, как и на древней «Пан-Европе», при пробуксовке зажигание становилось позже, а смесь – беднее, да и работает система BMW ASC (Automatic Stability Control) намного плавнее и расторопнее. Чуть позже борцом за справедливость стала Ducati, в 2008 году представив на модели 1098R систему DTC (Ducati Traction Control). Конечно, она имела мало общего с аналогичной «приблудой», применяемой в WSBK, но тем не менее тут уже были датчики скорости на обоих колесах (сигнал давали болты крепления тормозных дисков), и коррекция тяги (через изменение угла опережения зажигания и количества подаваемого топлива) производилась на основании «живых» показателей, получаемых в режиме реального времени, хотя тоже по прописанному в памяти системы управления шаблону (как у Suzuki и MV Agusta). Принципиальное отличие в том, что тут пробуксовка отслеживалась не только через внезапный рост частоты вращения коленвала, но и через скорости вращения обоих колес. Отличало «гражданский» трэкшн от гоночного то, что на серийных спортбайках, в отличие от гоночных, нет датчиков положения подвесок, да и в гонках мало кого интересует экономия бензина, и при пробуксовке на гоночных Ducati «рубилось» зажигание. Однако если такой способ применить на серийной машине со штатным выхлопом, то через пару таких срабатываний антибукса, катализатор повесится на проводе от лямбда-зонда, поэтому «рубят» еще и топливо, жертвуя небольшой потерей тяги, обусловленной «высушиванием» впускных каналов. Степень «вмешательства» электроники в характер мотора делится на восемь ступеней, плюс систему можно отключить вовсе. Однако на новой Multistrada скорость вращения колес считывается уже не по болтам, а с датчиков ABS – так намного точнее, ведь если считывать скорость по болтам, то получается 6–8 импульсов за оборот колеса (то есть 60 и 45 градусов между импульсами), а если через «гребенку» индукционного датчика ABS, то можно получить до сорока импульсов за один оборот. Но возвращаясь к хронологии событий, скажем честно, система BMW ASC дальше оппозитного нейкеда R1200R не ушла, ведь в 2009 году появилась DTC (Dynamic Traction Control) на нашумевшем спортбайке S1000RR – кошмаре для японских производителей. Она по праву может нести звание шедевра инженерной мысли, ибо содержит не только эти самые датчики ABS, но и гироскоп, который отслеживает крены и дифферент машины. Именно благодаря гироскопу на S1000RR невозможно «перекозлить» (конечно, если система DTC вовсе не отключена), а также максимально точно отследить ситуацию в повороте (ведь если антибукс перестрахуется и заработает раньше времени, то меньше тяги удастся реализовать, что приведет к ненужной потере скорости).

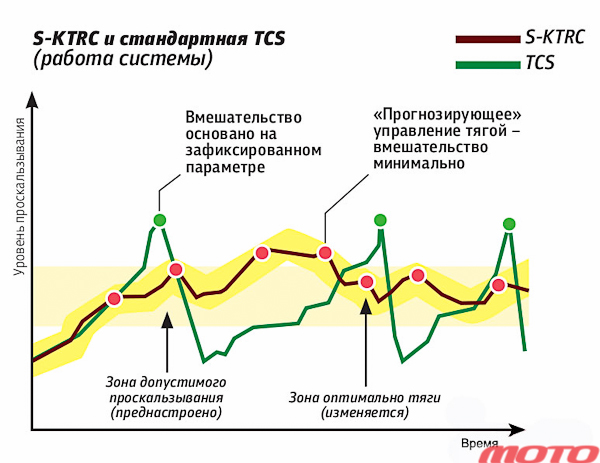
Например, в режиме Slick тяга двигателя режется электронными дросселями и форсунками, стоит образоваться сносу кормы, но только при кренах мотоцикла более 23 градусов, что подразумевает адекватно аккуратное обращение с газом. Но еще на журналистском тесте в Портимао многие заметили, что при выходе из скоростного правого поворота с подъемом на финишную прямую мотоцикл уверенно задирал переднее колесо в воздух, несмотря на программу «антивили». BMW-шные инженеры-электронщики ограничились туманными объяснениями насчет сочетания факторов (наклон-подъем-разгон), которое запутывало электронный «мозг». Кроме того, из опыта эксплуатации редакционного спортивного BMW можно сказать, что баварский вариант «антибукса» работает все-таки грубо, приводя к задирам на резине после нескольких трек-сессий.Так же поступили и инженеры Kawasaki на ZX-10R Ninja, дебютировавшем этой зимой («Мото» № 02–2011) – там трэкшн-контроль несет в себе как прелести BMW-шной DTC, так и некие шаблоны, аналогичные тем, что применялись на прежних «нинзях» (фактически, как у Suzuki), что позволяет ему работать не только в «боевом», но и в превентивном режиме, пресекая попытки срыва колеса в юз на корню. А вот Yamaha решила, что на большом турэндуро Super Tén?r? не нужен гироскоп, и ограничилась обычным (по нынешним меркам) антибуксом, использующим лишь показания датчиков ABS. Результат – нареканий столько же, сколько и восторгов.
Взгляд в завтра.
Ввиду все большей «электронизации» современных мотоциклов, переходящих на электронное управление дросселями, а также с развитием систем ABS, думаю, что уже через десяток лет трэкшн-контроль появится даже на скутерах. И возможно, уже не с индукционными датчиками, которые, как известно, начинают работать только при достижении определенной скорости (обычно 15–20 км/ч), а с датчиками Холла, которым плевать на скорость (сейчас уже на большинстве автомобилей датчики скоростей вращения колес – «холлы»).
Прежде чем лезть в электронные дебри современных мотоциклов, вспомним, за что воюем. «Держак» – это максимальная сила, приложенная к колесу, при которой оно еще держится за асфальт, не соскальзывает. Причем важно понимать, что, грубо говоря, шине все равно, с какой стороны приложена сила, главное – ее максимальная величина. В реальности же на шину действуют разные по природе силы. Сдвинуть ее с траектории пытаются как продольные воздействия (при разгоне или торможении), так и поперечные (в повороте). При этом главным все равно остается векторная сумма сил (или суперпозиция). Если, например, мы хотим максимально использовать сцепление шин с асфальтом для противодействия центробежной силе, придется отказаться от торможения или разгона на дуге. Или наоборот, максимально эффективно оттормозиться можно только на прямой, любой поворот потребует своей доли сцепления в пятне контакта. Но уже давно испытания показали, что максимальный «держак» на сухом асфальте достигается при небольшой пробуксовке, практически на грани перехода от трения качения к трению скольжения. Именно этот момент создатели антиблокировочных систем и пытаются использовать во благо пилота, одновременно уберегая от юза, то есть трения скольжения. При торможении системы ABS позволяют колесу срываться в юз на какие-то мгновения и тут же – электроника отслеживает остановку колес очень быстро – вновь дают резине восстановить сцепление с асфальтом. А почему бы не заставить эффект работать во благо разгона? Именно так рассуждал инженер из компании Honda, разработавший систему ABS+TCS для вышедшей в 1992 году модели ST1100 Pan European. Как только разница угловых скоростей вращения колес (а измерялась она те два десятка лет назад через датчики ABS) превышала определенную величину, «мозг» управления мотором уводил зажигание в «поздноту» (мотик был карбюраторный, и воздействовать на состав смеси не было возможности), и тяга мотора резко падала.
Несложно предположить, что при этом разница угловых скоростей вращения колес уменьшалась, и как только она доходила до разумного – по мнению «мозгов» – предела, мотор возвращался в штатный режим. Но та система уберегала мотоцикл от активной пробуксовки при разгоне по прямой, не спасая от лоусайдов при неаккуратном обращении с ручкой газа в поворотах. Ведь в наклоне сорвать колесо в пробуксовку намного легче из-за того, что часть «держака», как мы помним, расходуется на противодействие центробежной силе. Если же сумма сил, приходящихся на пятно контакта покрышки с дорогой, превысит силу трения, колесо сорвется в юз, а корма мотоцикла вильнет наружу поворота, ставя байк боком к траектории поворота. Дальше возможны три варианта развития ситуации. Первый, наилучший: пилот не испугался и не закрыл панически дроссель, а сбросил газ быстро, но плавно – и мотоцикл стабилизировался. Второй, «продолженный»: пилот продолжил открывать газ, и через миг мотоцикл «лег» (лоусайд). Третий, «брутальный»: если пилот закрыл газ поздно или слишком резко, резина моментально вновь обретает надежное сцепление с асфальтом, но кинетическая энергия «вилятельного» движения заставляет мотоцикл подпрыгнуть, перевернуться и вышвырнуть пилота из седла (хайсайд). Так вот, современные системы трэкшн-контроля как раз и борются за удержание заднего колеса на грани сцепления резины с дорожным покрытием и вступают в работу главным образом как раз в поворотах, когда риск пустить заднее колесо в занос намного выше среднего.
Как они делают это?
Заметим сразу: никакого сходства у мотоциклетных и автомобильных противобуксовочных систем нет. В мире четырех колес системы трэкшн-контроля не только играют с тягой двигателя, но и подтормаживают отдельные колеса. У нас же – только одно ведущее колесо и коррекция тяги двигателя исключительно в меньшую сторону. Мотоциклетный антибукс сейчас стал настолько модным трендом, что практически все мотопроизводители занимаются активным внедрением подобных устройств, однако мы перечислим наиболее ярких представителей этой новой породы электронных «мулек». Первые системы нынешнего века, призванные сделать реакцию на газ более плавной и тем самым бороться со сносом заднего колеса на «гражданских» аппаратах, стали применять на литровом «гисере» 2007 года. Там не было ни датчиков скоростей вращения колес (спидометр не в счет), ни гироскопов, но зато там был второй ряд дроссельных заслонок с приводом от шагового электромотора, управляемый «мозгами». По косвенным параметрам (скорость мотоцикла, выбранная передача, положение ручки газа) оценивалась нагрузка на мотор, и на основании этих параметров контроллер систем зажигания и впрыска в зависимости от выбранной программы управления (а всего их там было три) ограничивал тягу, а точнее, скорость набора двигателем оборотов под той или иной нагрузкой.
За литром последовали и «младшие братья» – обзавелись многорежимными «мозгами», которые есть даже на нынешней «шестисотке». По этому же принципу работает и «стабилизатор» на MV Agusta F4. Да, работает, но уж больно неточно. Не имея возможности отследить дорожную обстановку по прямым параметрам (угол наклона мотоцикла, скорости вращения обоих колес), такой способ уберечь заднее колесо от сноса можно назвать лишь условным.Следующим стал концерн BMW в 2006 году с вполне себе «гражданским» R1200R. Тут и скорости вращения колес отслеживались через датчики системы ABS, и, как и на древней «Пан-Европе», при пробуксовке зажигание становилось позже, а смесь – беднее, да и работает система BMW ASC (Automatic Stability Control) намного плавнее и расторопнее. Чуть позже борцом за справедливость стала Ducati, в 2008 году представив на модели 1098R систему DTC (Ducati Traction Control). Конечно, она имела мало общего с аналогичной «приблудой», применяемой в WSBK, но тем не менее тут уже были датчики скорости на обоих колесах (сигнал давали болты крепления тормозных дисков), и коррекция тяги (через изменение угла опережения зажигания и количества подаваемого топлива) производилась на основании «живых» показателей, получаемых в режиме реального времени, хотя тоже по прописанному в памяти системы управления шаблону (как у Suzuki и MV Agusta). Принципиальное отличие в том, что тут пробуксовка отслеживалась не только через внезапный рост частоты вращения коленвала, но и через скорости вращения обоих колес. Отличало «гражданский» трэкшн от гоночного то, что на серийных спортбайках, в отличие от гоночных, нет датчиков положения подвесок, да и в гонках мало кого интересует экономия бензина, и при пробуксовке на гоночных Ducati «рубилось» зажигание. Однако если такой способ применить на серийной машине со штатным выхлопом, то через пару таких срабатываний антибукса, катализатор повесится на проводе от лямбда-зонда, поэтому «рубят» еще и топливо, жертвуя небольшой потерей тяги, обусловленной «высушиванием» впускных каналов. Степень «вмешательства» электроники в характер мотора делится на восемь ступеней, плюс систему можно отключить вовсе. Однако на новой Multistrada скорость вращения колес считывается уже не по болтам, а с датчиков ABS – так намного точнее, ведь если считывать скорость по болтам, то получается 6–8 импульсов за оборот колеса (то есть 60 и 45 градусов между импульсами), а если через «гребенку» индукционного датчика ABS, то можно получить до сорока импульсов за один оборот. Но возвращаясь к хронологии событий, скажем честно, система BMW ASC дальше оппозитного нейкеда R1200R не ушла, ведь в 2009 году появилась DTC (Dynamic Traction Control) на нашумевшем спортбайке S1000RR – кошмаре для японских производителей. Она по праву может нести звание шедевра инженерной мысли, ибо содержит не только эти самые датчики ABS, но и гироскоп, который отслеживает крены и дифферент машины. Именно благодаря гироскопу на S1000RR невозможно «перекозлить» (конечно, если система DTC вовсе не отключена), а также максимально точно отследить ситуацию в повороте (ведь если антибукс перестрахуется и заработает раньше времени, то меньше тяги удастся реализовать, что приведет к ненужной потере скорости).
Например, в режиме Slick тяга двигателя режется электронными дросселями и форсунками, стоит образоваться сносу кормы, но только при кренах мотоцикла более 23 градусов, что подразумевает адекватно аккуратное обращение с газом. Но еще на журналистском тесте в Портимао многие заметили, что при выходе из скоростного правого поворота с подъемом на финишную прямую мотоцикл уверенно задирал переднее колесо в воздух, несмотря на программу «антивили». BMW-шные инженеры-электронщики ограничились туманными объяснениями насчет сочетания факторов (наклон-подъем-разгон), которое запутывало электронный «мозг». Кроме того, из опыта эксплуатации редакционного спортивного BMW можно сказать, что баварский вариант «антибукса» работает все-таки грубо, приводя к задирам на резине после нескольких трек-сессий.Так же поступили и инженеры Kawasaki на ZX-10R Ninja, дебютировавшем этой зимой («Мото» № 02–2011) – там трэкшн-контроль несет в себе как прелести BMW-шной DTC, так и некие шаблоны, аналогичные тем, что применялись на прежних «нинзях» (фактически, как у Suzuki), что позволяет ему работать не только в «боевом», но и в превентивном режиме, пресекая попытки срыва колеса в юз на корню. А вот Yamaha решила, что на большом турэндуро Super Tén?r? не нужен гироскоп, и ограничилась обычным (по нынешним меркам) антибуксом, использующим лишь показания датчиков ABS. Результат – нареканий столько же, сколько и восторгов.
Взгляд в завтра.
Ввиду все большей «электронизации» современных мотоциклов, переходящих на электронное управление дросселями, а также с развитием систем ABS, думаю, что уже через десяток лет трэкшн-контроль появится даже на скутерах. И возможно, уже не с индукционными датчиками, которые, как известно, начинают работать только при достижении определенной скорости (обычно 15–20 км/ч), а с датчиками Холла, которым плевать на скорость (сейчас уже на большинстве автомобилей датчики скоростей вращения колес – «холлы»).